Hi, I'm Nafees
Computer Vision Engineer
By profession, I talk to Robots and attempt to figure out how they See me. By nature, I prefer discussions about Deep Learning with humans.
Contact MeAbout Me
Erasmus+ Awardee
Doing master's thesis on active perception for robotics grasping utilizing 3D deep learning, a part of the Joint Master's degree program in Intelligent Field Robotic Systems at the University de Girona, Spain, and the University of Zagreb, Croatia.
experience
projects
worked
Technical Skills
Deep Learning
More than 1 yearCNN
80%PyTorch and PyTorch3D
60%Keras & TensorFlow
25%Robotics & Vision
More than 1 yearPerception and Planning
80%ROS
55%Gazebo
55%OpenCV
70%Machine Learning
More than 2 yearsAlgorithms
90%Scikit-Learn
70%Matplotlib
80%Numpy and Pandas
80%Programming Languages
Python
90%C++
55%SQL
70%Miscellaneous Tools
Docker
25%Flask
25%Git
70%Latex
90%Qualification
My personal journeyEMJ MEng.
Intelligent Field Robotic Systems University of Girona, Spain. and, University of Zagreb, Croatia.BSc Hons.
Computer Science International Islamic University, MalaysiaVisiting Researcher
KTH Royal Institute of Technology - Sweden The plan is to adopt a network architecture that can operate directly on meshes, such as MeshCNN, to either, given a mesh and a grasp, rank the grasp's likelihood of success on the mesh, or generate grasps given a mesh.Summer Intern
VICOROB - Spain Implemented several encoder-decoder based deep learning models for real-time side scan sonar image segmentation.Junior Researcher
IBM CoE and UMP - Malaysia Analyzed data from vehicular sensors, created a curated dataset and implemented ML algorithms.Teaching Assistant
IIUM - Malaysia Conducted labs of Math for Computing and Data Structure & Algorithms.Portfolio
Recent Papers and Projects
Stereo Visual Odometry
This is a relatively naive pipeline to implement stereo visual odometry for road vehicles. For experimental evaluation and validation KITTI dataset and SLAM toolbox named EVO have been used
Demo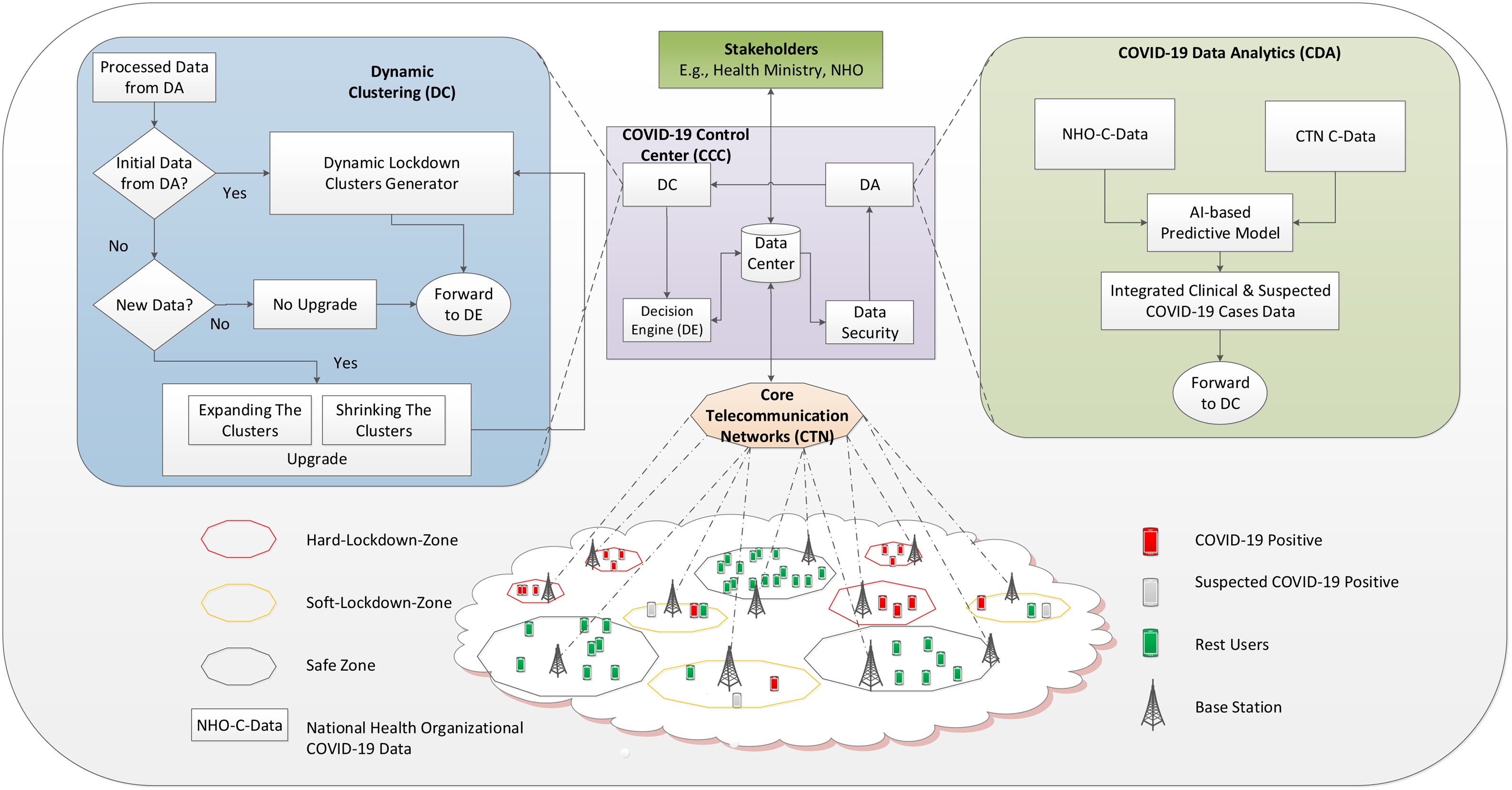
Data-driven dynamic clustering framework for mitigating the adverse economic impact of Covid-19 lockdown practices
Journal: Sustainable Cities and Society
Paper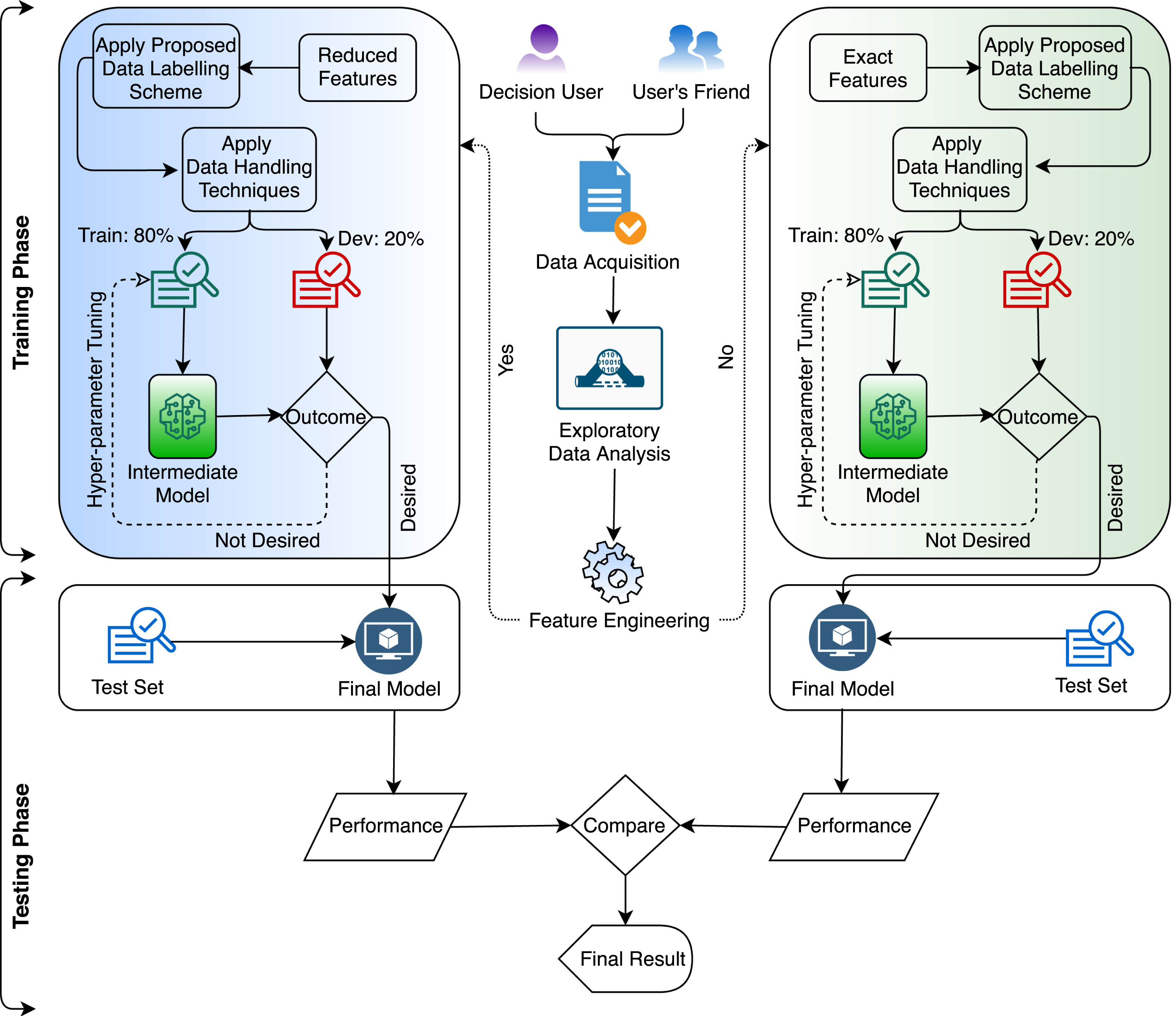
SPY-BOT: Machine learning-enabled post filtering for Social Network-Integrated Industrial Internet of Things
Journal: Ad-Hoc Networks
Paper
GIS Mapping
Predictive Modelling for Flood Rescue Operation using Supervised, Unsupervised ML algorithms and GIS mapping
DemoAchievements

Malaysian Technology Expo
Best Innovation AwardsDeveloped a mobile application for dynamic clustering to prevent COVID-19.

NASA Space App Challenge 2019
2nd Runner UpDeveloped an AI based website that aims to reduce climate change through the plantation.

NIIC Malaysia
Gold MedalistAI based GIS mapping for smart flood rescue operation.